伺服馬達(Servo Motor) 是對用於使用伺服機構的馬達(電動機)總稱。
伺服馬達是以回饋訊號控制,採用閉迴路系統,將感測器裝在馬達與控制對象機器上,偵測結果會返回伺服放大器與指令值做比較。
伺服馬達分為直流(DC servo motor)和交流(AC servo motor)兩種
直流伺服馬達因為操作容易,也就是旋轉方向由電流決定,並且旋轉速度由改變施加的電壓來控制,控制簡單所以廣泛使用因此現在直流伺服馬達是使用最多的馬達。
永磁式直流伺服馬達,其永久磁鐵在外,而會發熱之電樞線圈(armature winding)在內,因此散熱較為困難。
交流(AC)伺服馬達多使用感應馬達與直流無刷馬達。為了讓感應馬達變化旋轉速度,必須改變電源頻率,因為這個目的而使用變頻器(Inverter)。
通常包含三個主要部份:伺服馬達、速度迴路驅動器與位置迴路控制器。
無刷式伺服馬達在高性能伺服應用場合如電腦控制數值工具機、工業機器人等, 均已逐漸取代了傳統式的有電刷的直流伺服馬達(dc servo motor)。
無刷式伺服馬達主要可分為兩大類
(1)無刷式直流伺服馬達(brushless dc servo motor),一般亦稱之為永磁式同步馬達(PM synchronous motor) 或永磁式交流伺服馬達(PM ac servo motor)。
(2)感應式交流伺服馬達(induction ac servo motor)
| 伺服馬達 | 交流機 | 無刷 | 同步電動機 | 永磁式同步馬達 (PM synchronous motor)
無刷直流伺服馬達 (brushless dc servo motor) 永磁式交流伺服馬達 (PM ac servo motor) |
|---|---|---|---|---|
| 感應電動機 | 感應式交流伺服馬達 (induction ac servo motor) | |||
| 直流機 | 有刷 | 直流馬達 | 永磁式直流伺服馬達 (dc servo motor) |
交流伺服馬達
交流伺服馬達,不論是永磁式同步或感應式,其造成旋轉磁場之電樞線圈,均置於馬達之外層, 因而散熱較佳,有較高的功率體積比,且可適用於直接驅動系統。
交流馬達依其轉矩產生方式可分為兩大類
(1) 同步交流馬達(synchronous ac motor):
同步交流馬達因其轉子可由外界電源或由本身磁鐵而造成之磁場與定子之旋轉磁場交互作用而達到同步轉速。
(2) 感應交流馬達(induction ac motor):
但是感應交流馬達之轉子則因定子與轉子間的變壓器效應 (transformer effect) 而產生轉子感應磁場, 為了維持此感應磁場以產生旋轉扭矩,轉子與定子之旋轉磁場間必須有一相對運動—滑差(slip;轉差), 因此感應馬達之轉速無法達到同步轉速。
步進馬達(Stepper motor; Step motor)
步進馬達(Stepper motor; Step motor)是直流無刷同步馬達的一種,為具有如齒輪狀突起(小齒)相鍥合的定子和轉子,可藉由切換流向定子線圈中的電流,以一定角度逐步轉動的馬達。
步進馬達的特徵是因採用開迴路控制(Open-loop control)處理,切換電流觸發器的是脈波信號,不需要位置檢出和速度檢出的回授裝置,所以步進馬達可正確地依比例追隨脈波信號而轉動,因此就能達成精確的位置和速度控制。
通常包含三個主要部份:控制器、驅動器與馬達本體。
使用上的選擇
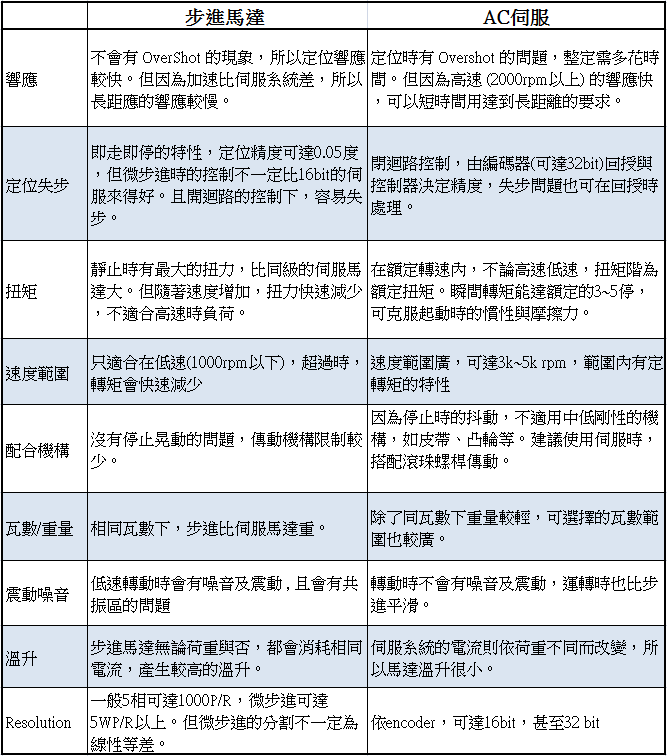
以反應來做分類:
伺服馬達:
響應速度快,可在短時間內達到高速 (2000rpm 以上)。例如:CNC加工機、研磨機。
步進馬達:
響應速度較慢,若要達到高速,其所需加減速時間必須很長,相對耗時。
以速度來做分類:
伺服馬達:
可使用的速度範圍比較寬廣,最高轉速可達到3000 ~ 5000 rpm,除此之外,伺服馬達具備定轉矩的特性,且在瞬間轉矩能達到額定轉矩的3~5倍,所以在速度調整時,不會因速度的關係而轉矩會有變化。
步進馬達:
較適合用在中低速的場合,1000 rpm 以內的轉矩,甚至可以高於伺服馬達的額定轉矩,但超過1000 rpm時,馬達的力量就會衰減,轉矩會低於伺服馬達的額定轉矩。
如果速度條件是在1000 rpm 以內,會建議使用步馬達即可。
以定位來選擇:
伺服馬達:
因停止時會有定位時間,故對於頻繁的短距離定位場合較不合適。
步進馬達:
有即停即走的特性,步須定位時間,可以節省須多時間,較適合頻繁短距離的移載。
以傳動機構的剛性來選擇:
伺服馬達:
因停止時會有定位時間的問題,故使用中低鋼性的機構時,停止時會有抖動問題。
步進馬達:
在停止時是完全靜止的,不會有晃動的情況產生,不管是高中低剛性的場合,步進馬達都適用。
 |


